


A robust automotive network interface.
The device can act as an Ethernet-CAN(/FD) or, Ethernet-LIN interface as well as CAN(/FD)-LIN gateway, and a user-scripting feature allows to run user applications directly on the device. The open communication protocol enables access to interface’s channels over Ethernet or USB.
The communication protocol over Ethernet or USB enables access to CAN(/FD) and LIN bus channels over TCP/IP or virtual COM port respectively.
A user-scripting feature, which allows to run user applications directly on the MCU, can be used for HiL testing and rest-bus simulations. The device can act as an interface, a gateway, or bridge between all its channels.
An analogue input and a digital output enable the user to interact with external peripherals.
Integration
The open communication protocol (API) allows you to easily access CAN(/FD) and LIN channels over Ethernet TCP/IP or USB VCP. Over the protocol, the user can configure the CAN/CAN FD/LIN channels and transmit and receive frames.
User Programming
The device firmware can also be fully customizable in C language. An open-source SDK, which shows the use of all the peripherals, is available on GitHub. A user application can be uploaded into the device over web bootloader or USB. It is also possible to debug the application directly on the target (STM32 SWD).
- Firmware customizable in C/C++
- Free-of-charge C language SDK
- Free-of-charge IDE and C/C++ compiler
- Firmware update over USB, Ethernet or ICSP
Usage Examples
- ETH-CAN(/FD) and ETH-LIN interface
- CAN(/FD) – LIN gateway
- CAN – CAN-FD gateway
- Remaining bus simulations
- User-programmable HiL simulations
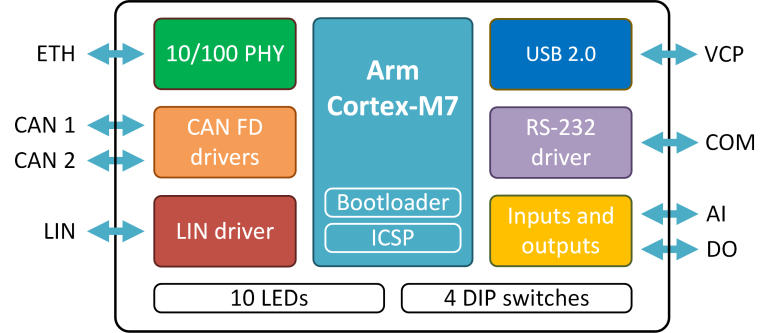
- 10/100 Ethernet port
- 2 CAN channels with CAN FD support
- LIN channel
- USB 2.0
- RS-232
- Analogue input and digital output
- 4 DIP switches
- 10 status LEDs
- Open communication protocol for integration over Ethernet and USB
- User-programmable
- Externally or USB-powered
- Table-top use or DIN-rail mount
| Property | Value |
|---|---|
| The information herein is subject to change without notice. | |
| Communications and User-Programming | |
| Channels | 1 Fast Ethernet (10BASE-T / 100BASE-TX, IEEE 802.3u) 2 CAN-HS (ISO 11898-2) with CAN FD support (ISO 11898-1:2015; CAN 2.0A/B, ISO CAN FD) 1 LIN bus (supports both master and slave; ISO 17987; LIN 2.2a) 1 USB 2.0 CDC (Virtual COM port) 1 RS-232 |
| Integration | Communication protocol for accessing CAN-FD and LIN channels over Ethernet (TCP/IP) and USB (VCP) |
| User-programming | Free-of-charge C SDK with programming examples Free-of-charge IDE and GNU C/C++ compiler (STM32CubeIDE) |
| Firmware update | over Ethernet, USB, or ICSP (ST-LINK) |
| Debugging | ST-LINK SWD (a programming header required) |
| Electrical | |
| Transreceivers | CAN-FD: MCP2562FD LIN: MCP2003B Ethernet: KSZ8041 |
| I/O | 1 Analogue input (0-5 V) 1 Digital output (5 V push-pull, 0.5 A, PWM capable) |
| LEDs | 5 Dual-color LEDs 2 Single-color LEDs 2 ETH LEDs (RJ-45 connector) 1 Power LED |
| MCU | STM32H7 (1 MB Flash, 564 KB RAM) |
| Power | USB-powered over Micro-USB (not for LIN bus) External 9 - 30 V DC power input (polarity and surge protection) over DSUB connector or terminal block |
| Consumption | 100 mA @ 12 V |
| Mechanical | |
| Connectors | 2 DSUB9M 1 RJ-45 1 Micro-USB 1 Terminal block (2-pin) |
| Switches | 4 DIP switches |
| Dimensions (L x W x H) | 108 x 82 x 33 mm |
| Weight | 185 g |
| Operating temperature | -20 to 70 °C |
| Enclosure | Aluminum profile |
| Protection | IP20 |
| Placement | Table (adhesive pads included) DIN-rail mount (see Ordering Information) |
MACH-ETH User Manual
MACH-ETH Communication Protocol Specification
MACH-ETH User programming SDK